MARC visitors and sponsors can expect high-quality research that targets the efficiency, accuracy, and safety of autonomous systems and robots.
Our faculty partners with students and external agencies on projects ranging from responsible robotics to real-world systems. As part of George Mason's broader strength in robotics and autonomous systems, we understand both the possibilities and the limits of Artificial Intelligence (AI) and the importance of testing emerging technologies for improved usability.

Advance your expertise in robotics and autonomous systems through educational programs that complement MARC’s research in swarm robotics, AI, and resilient autonomous technologies.
Our Research Areas
Our research encompasses many autonomy and robotics areas including:
- Human-Robot Interaction
- Sensors
- Distributed Intelligence
- Swarm Robots
- Multi-robot systems
- Computational Statistics
- Data Analytics
- Artificial Intelligence
- Neuromorphic Learning
- Biomedical Robots
- Defense Systems
- Underwater Robotics
Studying Human and Robot Co-learning through Human-Blimp Interaction
Presenting the first HRI demonstration between an uninstrumented human and a robotic blimp. Developed a natural interaction between a human and a robotic blimp via human face detection and hand gesture recognition using deep learning.
Associated Faculty: Daigo Shishika, Ningshi Yao

Distributed Intelligence with Lighter-Than-Air Vehicles (2023-Present)
This project builds robotic agents that operate reliably in dynamic, contested environments using distributed sensor-actuator pairs, tested through the Navy-sponsored Defend The Republic aerial soccer-style competition.
Associated Faculty: Daigo Shishika, Ningshi Yao
Verti-Wheelers
Improve wheeled mobility on vertically challenging terrain using minimally modified two-wheeled platforms. Collect data and present algorithms showing conventional wheeled robots can traverse terrain once considered non-traversable.
Associated Faculty: Xuesu Xiao
Social Robot Navigation
To address this challenge, imitation learning is a promising framework, since it is easier for humans to demonstrate the task of social navigation rather than to formulate reward functions that accurately capture the complex multi-objective setting of social navigation.
Associated Faculty: Xuesu Xiao
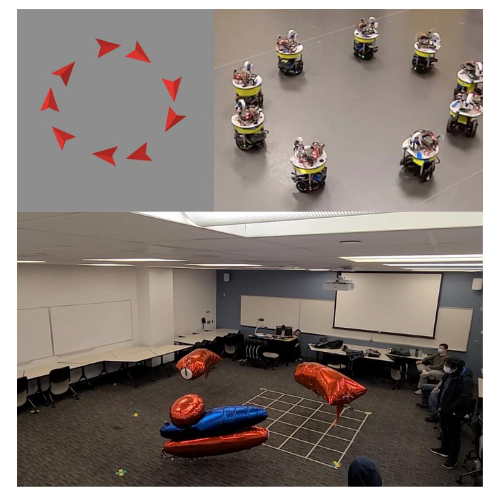
Enabling Emergent Behaviors in Unmanned Robotic System Systems (2018-2020)
Rigorously analyze distributed algorithms for robotic swarms to assess their robustness when collisions occur. The project focuses on identifying algorithms for physical swarm systems and determining whether collisions disrupt their intended emergent behavior.
Associated Faculty: Cameron Nowzari
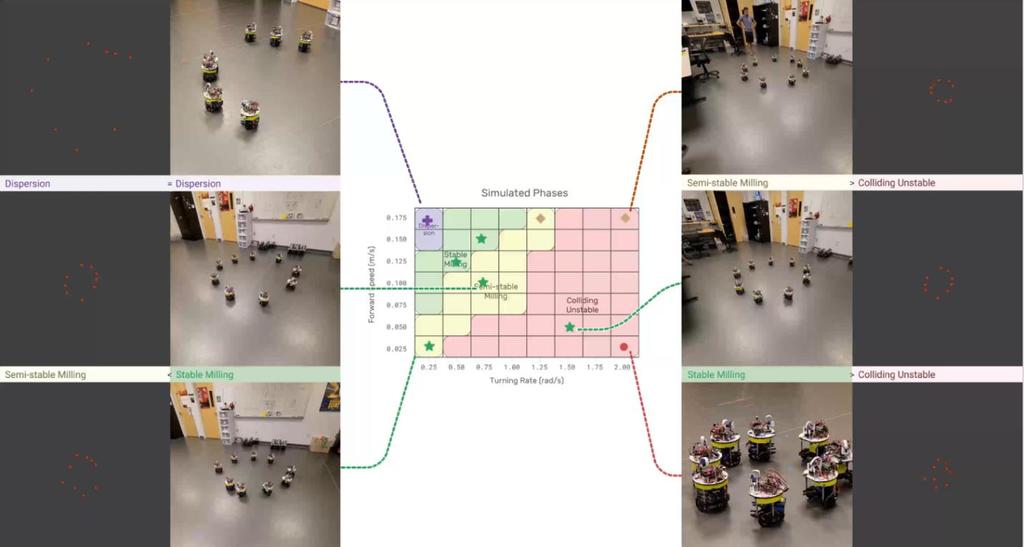
Rapid Design, Development, and Deployment of Robot Swarms via "Good-Enough" Simulations (2022 – Present)
This project takes a bottom-up approach to developing self-organized robot swarms by characterizing the emergent behaviors simple agents naturally exhibit in various environments. It aims to identify real-world conditions under which agents solve problems, supporting real-world robot deployment.
Associated Faculty: Cameron Nowzari, Maryam Parsa, Sean Luke
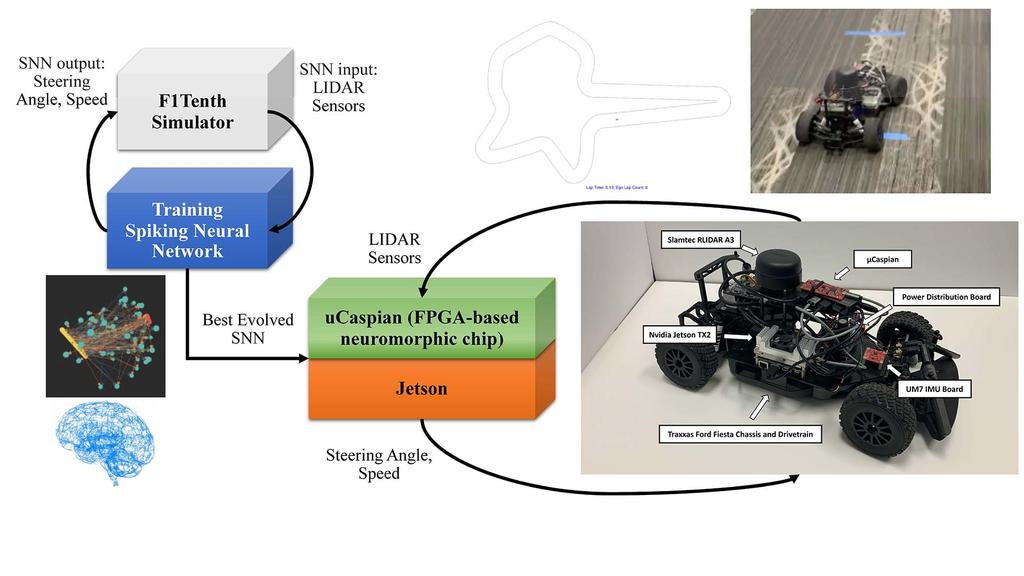
Neuromorphic Learning and Control of Robot Swarms (2023-present)
This project will achieve a breakthrough in robust, adaptable learning algorithms by combining neuroscience, brain-inspired AI, and swarm robotics, validated through digital simulations and physical experiments in dynamic, uncertain environments.
Associated Faculty: Cameron Nowzari, Maryam Parsa